February 2009
![]()
AutomatedBuildings.com
[an error occurred while processing this directive]
(Click Message to Learn More)
February 2009 |
[an error occurred while processing this directive] |
|
Itĺs Closer Than You Think |
Jeanne Dietsch, Stuart Rich, |
 ôRobots in every building? Not
in my lifetime,ö you may be thinking. Still, how many people, ten years ago,
would have guessed that by 2009 your average electrician would be pulling CAT6
cable for VOIP lines? Or that your mom would be downloading grandchildrensĺ
photos to her home PC? Or that WiFi connectivity would be a requirement in
every new commercial space of consequence?
ôRobots in every building? Not
in my lifetime,ö you may be thinking. Still, how many people, ten years ago,
would have guessed that by 2009 your average electrician would be pulling CAT6
cable for VOIP lines? Or that your mom would be downloading grandchildrensĺ
photos to her home PC? Or that WiFi connectivity would be a requirement in
every new commercial space of consequence?
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[an error occurred while processing this directive] |
Companies that keep pace with accelerating technological change grab market before stragglers even realize their core business has stepped sideways.
Now, forces are converging similarly to pull mobile robots into facilities. These forces include:1. Building Information Model (BIM) requirements
2. Supplying data for LEED documentation
3. Staffing problems
4. Management & maintenance costs
5. High liability risks
6. Increasing security demands
Believe it or not, mobile robots ľ combined with that WiFi connectivity mentioned earlier ľ lie at the center of solutions to all these issues. Mobile robots, by the way, are the ones that drive around by themselves and talk, not the industrial arms used to build automobiles.
Letĺs start with the BIM. Outside of buildings, satellite GPS has revolutionized construction, logistics and defense. What most people donĺt know is that many robots have Local Positioning Systems (LPS) that work even more reliably than the outdoor systems. These robots create as-built raster scans of building interiors that resemble floor plans, except that they include all the building contents as well as the walls. These horizontal building scans may be taken at one-foot height, for robot and emergency response use, and at four-foot height, for architectural verification. The procedure measures about 1,000 sq ft per minute.
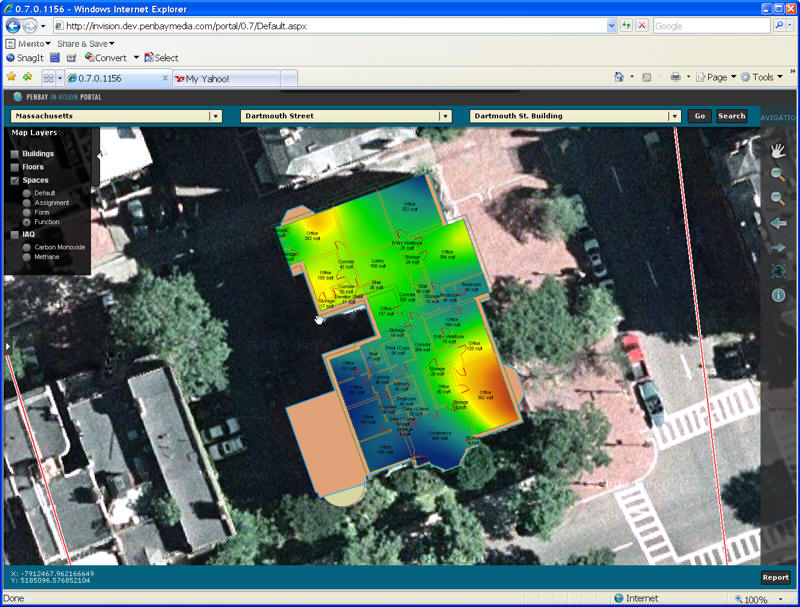
A robot scanned the interior of this building, while taking temperature
readings; the data was fed into the facility GIS to create this BIM.
One of the biggest impediments to developing BIM for
existing buildings is the time and expense required to collect the base data for
basic BIM development. Automating the data collection process with spatial
robotics drives a significant amount of time and cost out of the data collection
process and delivers a spatially integrated set of data into the BIM. This
information can also be integrated with GIS to give local to global information
on the performance of facility assets inside and out.
Anyway, as soon as the interior scan has been compiled, mobile robots can drive
autonomously in the space with Natural Feature Positioning Systems (NFPS).
Robots use NFPS to plan routes through the building, similarly to the way autos
use GPS. Since the robot knows where it is at all times (including which floor
it is on), it can tag any sensor readings, photographs, audio recordings and
actions with location- as well as time-stamps. Being on the network, these
robots can interact with electronic doors, elevators and access control systems.
They can also notify the building control system if they encounter conditions
that require immediate action.
Most autonomous robots can
perform multiple functions simultaneously.
This kiosk-style robot guides visitors during the day, handles security at night
and takes environmental readings 24X7.
What all this means is that many robots with LPS:
1. Create as-built space scans for verification, space utilization and other parts of the BIM. These scans also make the building ôrobot readyö for many other robots that use similar LPS scans for navigation.
2. Support Green Building standards by supplying time- and location-stamped data for monitoring and optimizing temperature, radiation, air quality and other energy and environmental characteristics
3. Can take repeated photos of the same view and provide 2-way audio from the same location, for:a. documenting insurance issues to reduce liability,
b. analyzing damage remotely to reduce management costs,
c. inspecting maintenance work remotely, also to reduce management costs,
d. checking safety, quality & compliance with regularly and reliably
e. enable remote surveillance and/or apply video analytics for automated detection of intruders, to improve security and reduce costs
f. remotely checking on staff activities, to improve efficiency
g. responding to some types of emergencies4. Pick up and drop off supplies, food, beverages, packages, luggage, medicine, emergency equipment and other goods
5. Complete regularly scheduled environmental sampling protocols without human guidance , for example, in a data center, where hot spots emerge and disappear quickly during any given day.
6. Guide or transport visitors, residents and staff to and from various parts of a building
[an error occurred while processing this directive] Oh, and a single robot might be responsible for many of these tasks simultaneously.
These are not future dream applications, by the way, or experiments taking place in research labs. These robots are all being used in commercial settings now, up and running for a year or more, thousands of miles a month. Some mobile robots operate alone or in pairs. Some run in large fleets. They are in hospitals, labs, factories and pharmaceutical companies. Soon they will be in data centers and hotels.
And did you noticeů. we didnĺt even mention vacuuming or floor care? Thatĺs because no one has yet productized LPS and NFPS in commercial floor care yet. But expect it before long.
About The Authors
 Jeanne
Dietsch is CEO and co-founder of MobileRobots Inc. She has led the company
from a kitchen-table start-up in 1995 to a manufacturer of thousands of
intelligent mobile robots and a global leader in robotic bases for commercial
and industrial robotic applications. Under her leadership, the company has
developed the most advanced autonomous systems for automated data collection,
materials handling, security and other aspects of facility management. Ms.
Dietsch is a member of IEEE Robotics & Automation Society's Industrial
Activities Board and co-authors the news column of IEEE Robotics and Automation
magazine. She serves on the review board of Industrial Robot journal and the
editorial board of Intelligent Service Robotics Journal. She was a founding
member on the Steering Committee of the Robotics Technology Consortium.
Jeanne
Dietsch is CEO and co-founder of MobileRobots Inc. She has led the company
from a kitchen-table start-up in 1995 to a manufacturer of thousands of
intelligent mobile robots and a global leader in robotic bases for commercial
and industrial robotic applications. Under her leadership, the company has
developed the most advanced autonomous systems for automated data collection,
materials handling, security and other aspects of facility management. Ms.
Dietsch is a member of IEEE Robotics & Automation Society's Industrial
Activities Board and co-authors the news column of IEEE Robotics and Automation
magazine. She serves on the review board of Industrial Robot journal and the
editorial board of Intelligent Service Robotics Journal. She was a founding
member on the Steering Committee of the Robotics Technology Consortium.
 Stuart
Rich is the Geospatial Practice Manager and a Principal Owner of Penobscot
Bay Media with more than 15 years experience developing database applications
and geographic information systems for government and non-government
environmental organizations across the U.S. and Japan. His specialized
experience includes project management, business process analysis, data analysis
and modeling, system architecture, strategic planning and workflow methodology
design for extensive geographic information systems. He has served as GIS
analyst and project principal for several large projects including creating and
installing Web Map Viewers at University of Pittsburgh Medical Center, US Air
Force Air Combat Command and Smithsonian Institute. He has developed enterprise
GIS systems for Maine Army National Guard, Langley Air Force Base and the US
Marine Corps. Mr. Rich has been a leader in the development of the Building
Interior Space Data Model (BISDM), a data model for creating, storing, and
sharing information about structures and their assets.
Stuart
Rich is the Geospatial Practice Manager and a Principal Owner of Penobscot
Bay Media with more than 15 years experience developing database applications
and geographic information systems for government and non-government
environmental organizations across the U.S. and Japan. His specialized
experience includes project management, business process analysis, data analysis
and modeling, system architecture, strategic planning and workflow methodology
design for extensive geographic information systems. He has served as GIS
analyst and project principal for several large projects including creating and
installing Web Map Viewers at University of Pittsburgh Medical Center, US Air
Force Air Combat Command and Smithsonian Institute. He has developed enterprise
GIS systems for Maine Army National Guard, Langley Air Force Base and the US
Marine Corps. Mr. Rich has been a leader in the development of the Building
Interior Space Data Model (BISDM), a data model for creating, storing, and
sharing information about structures and their assets.
