We spend the first hour of a meeting establishing what we mean by smart, how smart is smart, navigating disbelief, educating about new technology, and finally arriving at common ground.

Troy Harvey,
CEO
PassiveLogic
|
September 2019 |
[an error occurred while processing this directive] |
| Establishing
a Smart Building Industry Standard We spend the first hour of a meeting establishing what we mean by smart, how smart is smart, navigating disbelief, educating about new technology, and finally arriving at common ground. |
Troy Harvey, CEO PassiveLogic |
| Articles |
| Interviews |
| Releases |
| New Products |
| Reviews |
| [an error occurred while processing this directive] |
| Editorial |
| Events |
| Sponsors |
| Site Search |
| Newsletters |
| [an error occurred while processing this directive] |
| Archives |
| Past Issues |
| Home |
| Editors |
| eDucation |
| [an error occurred while processing this directive] |
| Training |
| Links |
| Software |
| Subscribe |
| [an error occurred while processing this directive] |
The problem with today's
“smart buildings” is they’re not actually smart. At best, they are
merely “connected.” Of course, we all know this to be true, but as an
industry, we lack the vocabulary to distinguish how smart “smart” is,
and thus, we lean on ambiguous terminology. This presents a serious
problem as we chart the path from the First Industrial Revolution
legacy to our inevitable future arrival at fully autonomous building
systems.
Why Vocabulary Matters
The term “Smart Building” has been in use since at least the 1990s,
coined to reference something “more” than just automation. It emerged
from the “Smart” lexicon — smartphone, smart home, smart grid, smart
cities — invoked when a product is more 4th Industrial Revolution than
1st.
Our industry — automation — was conceived in the 1st Industrial
Revolution legacy. The basic control loop, typified by the mercury
switch thermostat, still lives on as an emblem of the ingenuity of this
early 19th-century paradigm shift. In fact, the senior statesmen of our
industry — Honeywell, Siemens, Johnson, and Schneider — were all born
out of this early era.
But as our industry transitions to a diverse world of autonomous
systems, AI, and distributed IoT — new terminology is required. As
anyone operating in the space of “smarter” systems can attest, the
building automation industry’s lack of a clear lexicon is becoming a
barrier to communication. We spend the first hour of a meeting
establishing what we mean by smart, how smart is smart, navigating
disbelief, educating about new technology, and finally arriving at
common ground.
How can we as an industry provide clarity, chart a path to the future,
and distinguish between technological architectures — while also
communicating on a mutually understood foundation with our customers,
investors, and the public?
I have a proposal.
Autonomous Vehicles Standard
Other industries have faced this before, and we can borrow from their
success. Foreseeing a similar challenge, the Society of Automotive
Engineers (SAE) came together in 2014 to establish a common taxonomy
and terminology for autonomous driving systems. This standard charted
the course from conventional 1st Industrial Revolution vehicle
technology to the future of fully autonomous vehicles — with defined
thresholds for each level of autonomy, from level 0 to level 5. With
clear definitions charting a technological path forward, the autonomous
vehicles market has thrived with technological development,
architectural evolution, customer identity, market investment, and
cultural speculation.
We in the building controls industry don’t have to reinvent the wheel.
In fact, the future of autonomous buildings looks more similar to
autonomous vehicles than different, and much of their existing taxonomy
applies to the building industry.
Autonomous Buildings
What are autonomous buildings? Just like autonomous vehicles are the
pinnacle in the automated vehicle standard taxonomy, fully autonomous
buildings are the end-point of the “smart building” revolution. Like
autonomous vehicles, these next-generation buildings “navigate” in
real-time. Only instead of navigating a single car in a 2D spatial map,
autonomous buildings navigate a whole “fleet” of sub-systems
simultaneously in a multi-dimensional temporal map.
Fully autonomous buildings develop their own control sequences on the
fly in response to changing conditions. They're not based on static
sequences, set-points, PID, or simple state machines. They understand
their own underlying physics of operation and generate continuous
control paths. They can introspect those same physics and provide deep
insights, analytics, or more importantly — analysis. This analysis can,
in turn, be used to automate the commissioning and optimization of
systems. Fully autonomous building systems are aware of the future
implications of their control decisions, enabling them to navigate
around system “collisions” or energy “congestion” hours before it even
occurs. This future-forward control is uniquely possible because
buildings have accurate prediction horizons of many hours, or even
days, in contrast to the mere seconds that vehicle systems have to work
with.
Perhaps most importantly, autonomous buildings cooperate. Because
buildings are the primary building-blocks of cities, you obviously
can’t have smart cities without having truly smart buildings.
Autonomous buildings will act as agents in energy networks, buying and
selling energy futures using smart contracts, working with utilities
and district systems, and ultimately building the backbone for future
peer-to-peer grids.
Why do autonomous buildings matter? Buildings are the largest
controlled infrastructure in the world economy. They are also the most
complex. A typical commercial building has thousands of sensors and
hundreds of control points. When we add in complex dynamics like
occupancy, weather, and equipment variance, a simple state analysis
shows that the typical building has trillions of possible states. This
is well beyond the complexity of other industries, and beyond the
limits of today’s static approach, based on forms of Finite Automata —
which rely on sequence programming, PIDs, and setpoints.
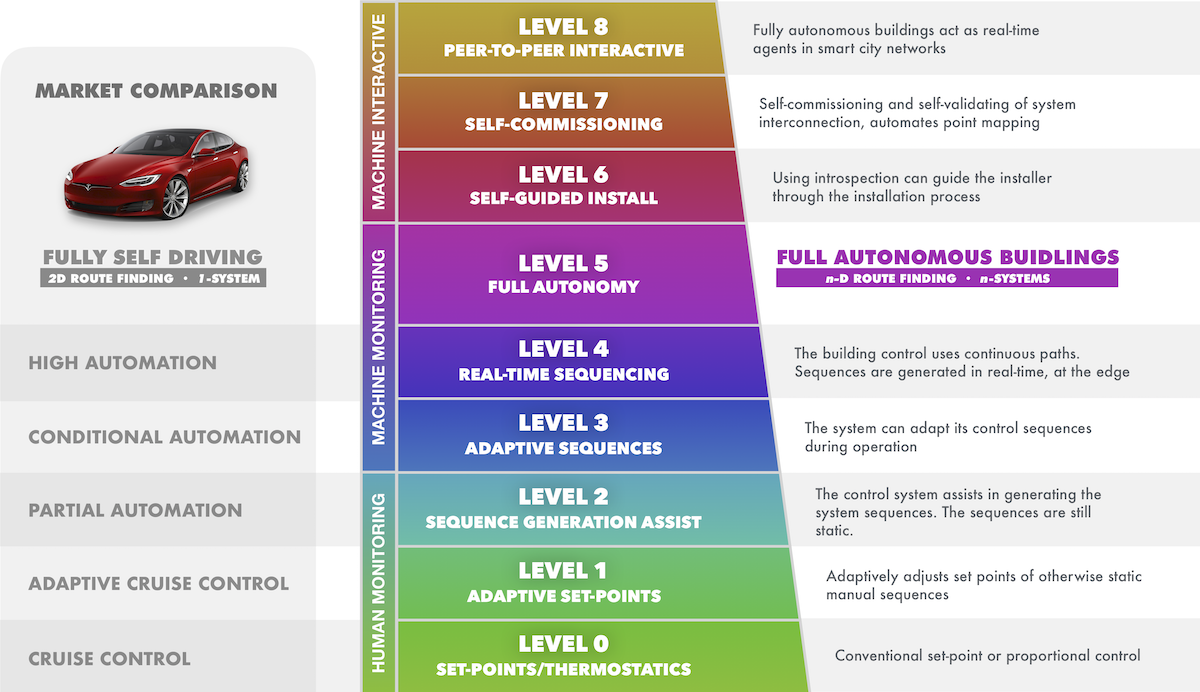
Taxonomy for Smart Buildings
We
propose starting with 6 levels of autonomy that are orthogonal to the
SAE Autonomous Vehicles Standard. In addition to this base set, we
propose adding 3 more levels to account for the greater levels of
autonomy buildings can achieve due to the fact that their control and
automation systems are site assembled, not limited by the factory
constructed uniformity of cars. These additional 3 levels account for
systems that guide their own installation (i.e. self-assembling),
self-commissioning systems, and self-networking systems.
[an error occurred while processing this directive]Our
proposed taxonomy — including levels 6-8 that go beyond the
Autonomous Vehicles Standard — is defined below.
Developing a language to discuss the future of our industry, the future of the control systems, and the buildings we interact with will prepare us to chart a course to buildings that are truly “smart.”
About the Author
Troy Harvey is the CEO of PassiveLogic, a
company developing the future of automation, built on digital twins
from the ground up.
[an error occurred while processing this directive]
[Click Banner To Learn More]
[Home Page] [The Automator] [About] [Subscribe ] [Contact Us]